
 当前位置:
当前位置:





从无人机起飞到降落,基本五个步骤就可以实现航拍全景。随着技术进步,特别是无人机“一键全景功能的”的实现,省了很多人工控制拍摄的步骤,航拍全景也变得愈发简单。本文并不针对某一型号无人机,只想从基础原理方面介绍一下,航拍全景应该如何实现。
一、起飞
在执行完飞行前所有检查项目和操作准备后,把无人机放在远离人群的一个水平、安全的平台上,在GPS模式下,摄影师远离无人机10米,掰杆起动电机,这时候无人机已经做好起飞准备。
二、定高悬停
无人机起飞至一定高度,到达满意位置后,精准悬停。拍摄前可根据实况构好图,各个角度测试一圈,防止悬停不稳,高空风速影响画面抖动。
关于拍摄高度选择,可以考虑两方面:首先,因为后期需要进行补天,飞机一定要高于物体,并且因为没办法真正的在一个位置完全不漂移,所以我们需要拍摄的时候尽可能与拍摄主体拉开一段距离,不要离得太近。但是也不是越高越好,当无人机超出我们的视线或者进入民航飞行领域,飞行风险也会增大。所以给初学者的建议是50-120米。
三、设置参数
对于全景航拍来说,最大的挑战是保持一个较大的动态范围。天空相对于光线较暗的地面来说显得非常明亮,这就很难在高光部分和阴影部分之间做好平衡,因此,在开始拍摄之前应对相机做好设置。
AUTO/M:M(手动)
光圈:许多航拍相机使用固定光圈(通常为f/2.8).如果是这样的话,那就特别要小心过度曝光。
快门:速度要快
平衡良好、飞行时不带云台的航拍无人机只要使用适当的减震功能,通常大约1/250秒的快门速度拍摄出锐利的照片;
带云台的航拍无人机在最低快门速度方面完全不同:配置功能良好的三轴云台的航拍无人机通常在快门速度为几秒或更多的情况下,也能拍摄出锐利的照片。
ISO:尽可能地低(现在多数航拍相机都使用小型传感器,ISO较高时,容易产生噪点)
白平衡:用户定义,5100K日光条件下
Grid:网格线(控制云台的准线)
四、旋转拍摄
1.相机水平状态下拍摄一圈
在app中观察相机取景,找到一个物体作为参照物,拍摄第一张,水平旋转镜头,利用参考线及目测第二张图与第一张图画面有40%重合时,进行拍摄。然后依次进行旋转、拍摄,直到水平360度景物全部被记录下来,大概拍摄张数为8-10张,具体以相机取景重合为准。
2.调整相机俯仰至向下30-45度拍摄一圈
3.俯仰至向下50-60度拍摄一圈
4.俯仰至向下90度拍摄一张或多张
在这里说明一下,以上给出的拍摄圈数和张数,并不是标准法则,只是提供参考。具体拍摄张数需要摄影师自行总结,最终达到的效果就是把所有的画面都涵盖到。
整个拍摄过程可以用一张图来表示
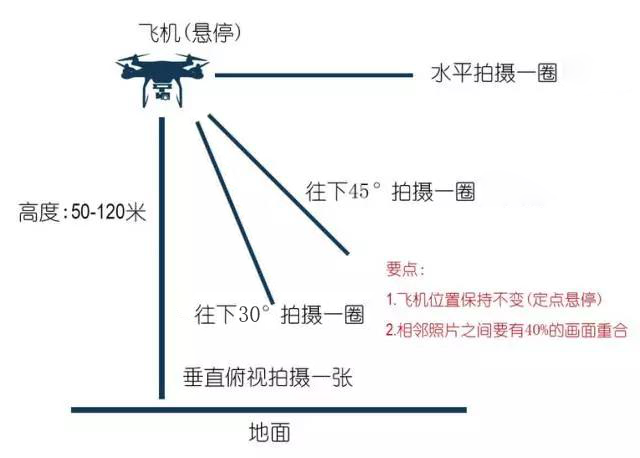
五、降落
拍摄完毕后,当无人机进行降落时,一定注意要控制下降速度,最好是缓慢下降,防止飞行器落地的撞击损坏飞行器。




